- Startsida
- Aktuella händelser/artiklar
- Livsåskådning & kristen tro
- Vetenskap & tro
- Skapelse & evolution
- Modern fysik
- Dagens adrenalinkick
- Kristers intressen, olika
kuriosa mm - Litteraturförteckning
- Inspelningar från mina
föredrag och predikningar - Innehållsförteckning
- Textsökning
- Info om hemsidan. Hur
navigerar man och hur
skriver man ut? Nyheter. - Maila mig
 SENASTE ARTIKELN:
SENASTE ARTIKELN:
Västvärldens undergång
(260104)- BRÄNNANDE ARTIKELSERIE:
Israel — ett älskat
hatobjekt (250815) - SÄRSKILT VIKTIG ARTIKEL:
Klimatet — en alltför
viktig fråga för att
låta känslor styra
(200302) - KRISTERS BLOGG
(Besöks på egen risk!)
Senast uppdaterad:
20/1 2018
![]()
"Godhet utan vishet och utan
gränser är bara en annan
form av ondska."
(John Paterson)
"Mänsklighetens bästa är alltid
tyrannens alibi!"
"Det är synd att 99% av
journalisterna skall fördärva
förtroendet för en hel yrkeskår"
(Okänd)
"Om du ropar "Gud är stor"
samtidigt som du spottar på
skändade kroppar av judiska
kvinnor, så hävdar jag att
din gud inte är en gud värd
att tillbe!
"När försiktigheten finns överallt,
finns modet ingenstans."
(den belgiske kardinalen Mercier)
"Den som gifter sig med
tidsandan blir snabbt änka."
(Goethe)
"Civiliserade är de kulturer
och individer som respekterar
andra."
(Hört på Axesskanalen)
"Det tragiska med vanligt
sunt förnuft är att det
inte är så vanligt."
(Albert Einstein)
"Halv kristendom tolereras
men föraktas.
Hel kristendom respekteras
men förföljs."
(Okänd)
The principle of least action (Minsta verkans princip)
(Note: at the top of the page you can choose translation of this article to other languages, but don't expect the translation to be perfect — "Välj språk" means "Choose language")
Fermats Princip
Ett av de verkligt stora namnen i matematikens värld var/är fransmannen Pierre de Fermat (1607-1665). Denne var domare till professionen medan han som fritidsnöje sysslade med matematik. Fermat var således amatörmatematiker, men räknas samtidigt som en av alla tiders störste matematiker. Han lämnade viktiga bidrag inom många områden av matematiken. Bland allmänheten är han kanske mest känd för Fermats stora sats (den läsare som vill veta mer om denna sats rekommenderas att googla eller fråga AI).
På Fermats tid hade man börjat studera ljusbrytning. Man hade bl a funnit att ljus, som från luft går in i glas eller vatten eller liknande, ändrar riktning. Och att samma sak gäller när ljuset går ut från glas eller vatten till luft. Eller generellt; när ljus går från ett medium till ett annat medium så ändrar det riktning (bryts). Hur mycket det bryts beror på vilka medium det handlar om. Låter vi en ljusstråle i luft (medium 1 i figuren nedan) falla in mot en plan glasskiva (medium 2) så ändrar strålen riktning på följande sätt:
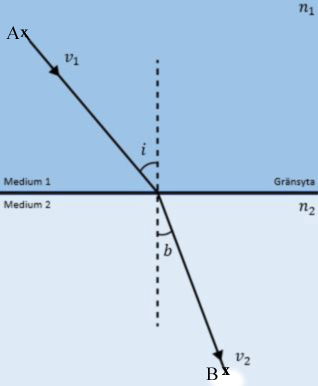
Brytning när ljus går från ett medium till ett annat (från ett optiskt tunnare medium till ett tätare). Medium 1 kan t ex vara luft medan medium 2 är glas. En ljusstråles infalls- och utfallsvinkel relativt gränsytan mäts relativt normalen (normalen är en rät linje vinkelrät mot gränsytan — den streckade, vertikla linjen i figuren). Ljus som kommer in vinkelrätt mot glasskivan har således infallsvinkeln noll. Vi ser att ljuset inte går kortaste vägen mellan punkterna A och B. Vi återkommer strax till detta.
Vi ser i bilden att ljuset bryts (kallas refraktion) när det går in i glaset. Vinkeln i är infallsvinkeln (från luft till glas) medan b är utfallsvinkeln (brytningsvinkeln). När en ljusstråle går från optiskt tunnare till optiskt tätare medium (t ex från luft till glas) bryts strålen mot normalen, dvs vinkeln minskar (b<i). Och tvärtom när ljuset går från optiskt tätare till optiskt tunnare. Detta på grund av att ljuset går långsammare i optiskt tätare medier (som glas) än i optiskt tunnare medier (som luft). Ljusets hastighet i vakuum är ca 300 000 km/s och ungefär densamma i luft. I glas ligger ljusets hastighet på runt 67% (varierar för olika glaskvaliteter) av ljusets hastighet i vakuum, dvs runt 200 000 km/s.
Ljusbrytning var ett väl känt fenomen på Fermats tid. Man hade till och med funnit en lag, kallad Snells lag, som angav sambandet mellan vinklarna:
där α (alfa) och β (beta) är infalls- respektive utfallsvinkel. Konstanterna n1 och n2 kallas brytningsindex och beror på de två mediernas optiska egenskaper. För vakuum och luft är n≈1,0. Värdena på olika ämnens brytningsindex hade bestämts genom experiment. Med hjälp av Snells lag kunde man konstruera olika typer av linser och därmed optiska instrument som kikare, mikroskop, glasögon etc. Vid den här tiden visste man inte varför Snells lag fungerade. Den utgjorde helt enkelt en anpassning till gjorda experiment.
Fermat lekte lite med denna lag, inspirerad av de gamla grekerna. Dessa sökte ofta efter grundläggande principer, som kunde förklara de observationer som gjorts. Dessa principer utgick från olika typer av symmetrier. Fermat kom fram till att ljusets brytning kan förklaras utifrån antagandet att en ljusstråle mellan två punkter alltid väljer den väg som tar kortast tid (den "väljer" således inte kortaste sträckan utan kortaste tiden). Detta kallas Fermats princip alternativt Principle of least time (principen för minsta tid). Eftersom ljus går långsammare i glas bör sträckan genom glaset förkortas. Dock inte för mycket, för i så fall kanske den längre totala sträcka man får inte kompenserar för vad man vinner genom att förkorta sträckan i glaset. Fermat visade att Snells lag kunde härledes utifrån Fermats princip. Ja i princip så kan hela optiken härledes utifrån denna princip, dvs att ljus väljer den väg som tar kortast tid. Det finns situationer där Principle of least time inte gäller, men av utrymmesskäl går vi inte närmare in på detta.
Varför "väljer" då ljuset den väg som tar kortast tid? Svaret är att det har med ljusets vågnatur att göra. Jag ber att få återkomma till detta i slutet av föreliggande text.
När man upptäckte Snells lag 1621 så visste man inte att ljusbrytningen orsakades av att ljusets fart ändrades. Brytningsindex (n) för ett ämne var helt enkelt ett slags mått på ett ämnes optiska egenskaper utan någon mer grundläggande innebörd. Så småningom förstod man att refraktion (ljusbrytning) orsakas av att ljuset förändrar sin fart när det går från ett medium till ett annat. Detta upptäcktes 1678 av den holländske fysikern Christian Huygens. Denne visade att ett mediums brytningsindex var direkt kopplat till ljushastigheten i detta medium. Om ljushastigheten i mediet a är lika med ca, så är a:s brytningsindex na=c/ca, där c är ljusets hastighet i vakuum.
Fermats upptäckt av principle of least time utgör det första kända exemplet på hur man kan lösa komplicerade fysikaliska problem genom att minimera en storhet (i detta fall tiden) och utgör det första kända exemplet på att naturen följer en optimeringsprincip.
En roande och samtidigt pedagogisk bild av ovanstående är följande: En nödställd person befinner sig några hundra meter ut från stranden. En livräddare, utan tillgång till båt eller liknande, befinner sig några hundra meter från vattnet. Denne skall nu så snabbt som möjligt ta sig till den nödställde, dvs välja den väg som tar kortast tid mellan de två punkterna.
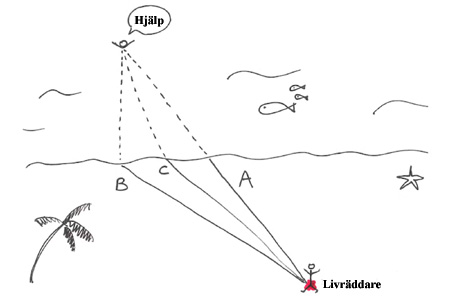
Först måste livräddaren springa ned till strandkanten och sedan simma ut till den nödställde. Man kan t ex välja väg A, som är den kortaste vägen (en rät linje). Men eftersom man springer mycket fortare än man simmar (precis som att ljus går fortare i luft än i glas), lönar det sig att välja en längre sträcka att springa för att på så sätt förkorta den sträcka man måste simma. Men väljer man alltför lång springsträcka, kanske den totala sträckan förlängs så mycket att den högre springhastigheten inte kompenserar för den längre totala sträckan. Det är en uppgift på gymnasienivå att exakt räkna ut den optimala vägen till den nödställde om man känner de två hastigheterna. Det visar sig att den formel man får fram helt enkelt är Snells lag (se ovan).
Maupertuis principle for least action (Maupertuis princip för minsta verkan)
Den schweiziske matematikern Johan Bernoulli (1667-1748), som var ungefär samtida med Isaac Newton, gjorde 1696 en matematisk analys av ett objekt som utan friktion, drivet av tyngdkraften, glider i en ränna mellan två punkter A och B (se figuren nedan). Han frågade sig vilken form rännan skulle ha för att minimera tiden mellan A och B? Den räta linjen mellan dessa två punkter är den kortaste sträckan. Men man kan tänka sig att om banan först är brantare så får kulan snabbare en hög fart som den sedan bibehåller (eftersom friktionen är noll). Även om banan sedan blir mindre brant än den raka banan och kulan därför accelererar mindre under resten av sträckan, kan en sådan bana ändå löna sig. Redan Galilei hade sysslat med detta problem ca 100 år tidigare, och även om han aldrig löste det fullständigt kunde han visa att en bana som är en del av en cirkelbåge (IV i figuren nedan) ger kortare tid än en rät linje (I). Galilei trodde (felaktigt) att cirkelbågen var den optimala formen på rännan (utgående från att cirkeln är helt symmetrisk). Bernoulli kunde, genom att koppla objektet i rännan till ett listigt tankeexperiment med ljusstrålar i ett medium med kontinuerligt varierande brytningsindex, visa att den optimala formen på rännan, av alla existerande former, var en cykloid (III — begreppet cykloid förklaras nedan).
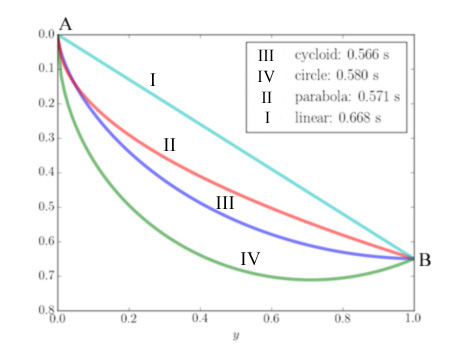
Vi tänker oss en kula som glider utan friktion från A till B i en ränna, där A ligger högre än B och rörelsen enbart orsakas av tyngdkraften. Det finns många möjliga banor mellan A och B. Den kortaste banan är en rät linje (I). Tyngdkraftens komposant i banans riktning kommer då att vara konstant hela vägen, dvs objektet kommer att ha en konstant acceleration mellan A och B. Man kan också tänka sig andra banor, t ex en som lutar väldigt starkt i början och sedan lutar mindre på slutet, eller till och med ger en uppförsbacke på slutet, som i cirkelbågen (IV). Där kommer objektet att snabbt få en hög fart som bibehålls under hela rörelsen, men sedan accelerera mindre på slutet eller till och med bromsa in (som i IV). Den högre "grundfarten" kan kanske kompensera för den mindre accelerationen på slutet. De tider som anges i figuren är teoretiskt beräknade tider, men dessa bekräftas av experiment. Utav de fyra kurvor som finns i grafen är cykloiden den som ger kortast tid för kulan. Mer avancerade beräkningar visar att cykloiden är den kurva av alla existerande kurvor som ger kortaste tiden.
Bernoulli kom således fram till att om rännan hade formen av en cykloid så passerade objektet rännan på kortast möjliga tid.
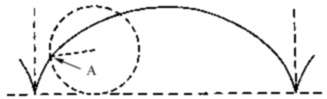
Vad är då en cykloid? Jo, antag att vi har ett hjul som rullar åt höger på ett golv utan att glida. Om vi tänker oss en punkt A längst ut på hjulet så kommer denna punkt att både rotera medurs och förflytta sig åt höger relativt betraktaren. A:s rörelse är således summan av dessa två rörelser, vilket blir den krökta, heldragna kurva som visas i grafen ovan. En sådan kurva kallas en cykloid. Bernoulli kunde genom sitt tankeexperiment visa att den bana som tar kortast tid för kulan måste ha denna form (en uppochnedvänd cykloid i förhållande till bilden ovan). Denna kurvform kallas också brachistochrone (vilket är det grekiska ordet för "kortast tid"). En kropp som påverkas av en yttre, konstant kraft och som rör sig från A till B längs en brachistochrone kommer fram till B på kortare tid än om kroppen rör sig längs någon annan typ av kurva.
Den franske fysikern Pierre Louis Maupertuis (1698-1759) försökte hitta en motsvarighet till Fermats princip för generella, mekaniska system. Han ville således hitta en allmän optimeringsprincip som inte bara skulle gälla för objekt som glider i rännor påverkade av tyngdkraften utan som skulle kunna tillämpas på alla typer av mekaniska system.
I stället för att beräkna ett mekaniskt systems tidsutveckling med hjälp av Newtons mekanik (dvs "bolla med" Newtons rörelselagar, krafter, hastigheter, energi etc) så tänkte sig Maupertuis att alla mekaniska problem skulle kunna lösas och förutsägas genom en enda allmängiltig princip. Vilken skulle kunna tillämpas ungefär som en maskin.
Maupertuis insåg att mekaniska system generellt inte väljer den väg mellan A och B som tar kortast tid (i så fall skulle det finnas in inbyggd intelligens i dessa system plus att systemet skulle vara tvunget att i förväg känna till hela "terrängen" mellan A och B.
Mänsklig intelligens kan, till skillnad från naturen, välja den väg som tar kortast tid. T ex en bilförare, som utifrån erfarenhet eller med hjälp av en karta väljer en väg han vet/tror är snabbare, fast den är längre. I GPS-navigatorer för bilar brukar man kunna välja mellan kortaste sträckan mellan A och B eller den väg som tar minst tid mellan de två punkterna. Detta är möjligt, eftersom GPS:en har tillgång till hela kartan och ofta också har information om trafiksituationen i realtid. En annat exempel på samma sak är livräddaren i exemplet ovan.
Eftersom Maupertuis insåg att tiden inte var rätt parameter att minimera när det gällde mekaniska system, letade Maupertuis efter någon annan storhet vars minimum kunde beskriva ett mekaniskt systems rörelse. Så småningom definierade han ett begrepp han kallade action (verkan/aktion), som han betecknade med S. Definitionen av ett objekts action gavs av sambandet
där m är objektets massa, v dess hastighet och s den sträcka objektet rör sig eller skall röra sig. S blir ju större ju större massan är och ju större farten är och ju längre objektet rör sig. Om rörelsen består av flera segment (delsträckor) summerar man bara action för varje delsträcka, typ
där ∑ är symbolen för summering. Dvs S hade precis de egenskaper Maupertuis ville att begreppet action skulle ha. S var således en representativ parameter för ett objekts rörelse.
Maupertuis principle of least action innebär att man tar fram en funktion som anger action (S) för det system som skall studeras. Man undersöker sedan hur S beror på de olika vägar systemet kan ta och väljer den väg för vilken S har ett "minium" (förklaras mer i detalj nedan). Detta är den väg som systemet kommer att ta. I stället för principle of least time har vi således principle of least action.
För att testa sin ansats valde Maupertuis att studera några enkla system. Bl a en boll som studsar mot en vägg (typ biljardboll). Genom att minimera action (S) för detta system fick han fram resultatet att bollens infallsvinkel är lika stor som dess utfallsvinkel (vilket stämmer både med våra observationer och med Newtons rörelselagar).
Låt oss nu helt kort repetera lite grundläggande funktionslära.
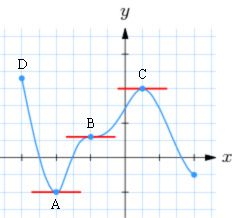
Figuren visar en godtyckligt vald funktion. Den har ett lokalt minimum i punkten A och ett lokalt maximum i punkten C ocn en s k terasspunkt i B. I A och B och C är funktionens derivata lika med noll, dvs i dessa tre punkter är grafen horisontell (stationär) inom ett infinitesimalt litet område.
Lite funktionslära: Det finns också något som kallas globala maximum och minimum. Med globalt maximum eller minimum menar vi det största respektive minsta värde som en funktion antar inom hela sin defintionsmängd. I figuren ovan är A både lokalt minimum och globalt minimum. Medan C är lokalt maximum och D globalt maximum (D har ett större y-värde än C). En del funktioner kommer från minus oändligheten och går mot plus oändligheten, som y=x3. Eller tvärtom. Funktionen y=x2 har sitt globala maximum i plus oändligheten och sitt globala minimum i y=0 (för x=0), vilken punkt samtidigt är ett lokalt minimum. Etc. I vissa fall är således globala maxima och/eller globala minima lika med plus eller minus oändligheten. Lokala extrempunkter kännetecknas av att de är stationära, dvs derivatan i punkten är noll och funktionen därmed horisontell i denna punkt (vilket beskrivs i texten nedan). En lokal extrempunkt kan samtidigt vara en global extrempunkt, som A i figuren.
När vi ovan talar om maximi- och minimipunkter för actionfunktionen talar vi således enbart om lokala sådana. Den längsta väg ett objekt kan ta mellan två givna punkter är ju lika med oändligheten. Skall vi förflytta oss mellan Stockholm och Örebro finns ingen gräns för hur lång vägen kan bli. Teoretiskt kan vi välja att åka via Andromedagalaxen, eller en galax som ligger miljarder ljusår bort. I det fall att ett fysikaliskt problem har sin lösning i ett maximum hos actionfunktionen handlar det således alltid om ett lokalt maximum, kring vilken funktionen är stationär.
I funktionsläran används begreppet derivata. Denna är ett mått på hur en funktion förändras när en variabel förändras. Om en funktion F anger folkmängden i ett land så får man fram folkökningen eller folkminskningen (förändringen av folkmängden) genom att ta derivatan av F. I derivatans nollställen hittar vi lokala maximi- och minimipunkter (toppen av ett "berg" respektive botten av en "dalgång" — C och A i figuren ovan). Samt terasspunkter (B). Dvs att derivatan är lika med noll kan antingen innebära ett maximum eller ett minimum eller en terasspunkt. Eftersom derivatan i ett maximum eller minimum eller en terasspunkt är noll är grafen i en sådan punkt horisontell. Och runt detta nollställe är derivatan nära noll, dvs grafen är nästan horisontell i detta område, vilket framgår av figuren ovan. Runt ett lokalt maximum eller minimum eller en terasspunkt är således funktionen i stort sett stationär (varierar minimalt).
Nu handlar ju principle of least action inte om derivator utan om variationer (se nedan), vilket inte riktigt är samma sak. Men resonemanget om derivator kan tillämpas även i detta sammanhang. Ibland kan lösningar till fysikaliska problem med hjälp av least action innebära en motsvarighet till ett maximum eller en terasspunkt av S i stället för motsvarigheten till ett minimum. Ibland säger man därför principle of stationary action i stället för principle of least action. Vilket är mer korrekt. Trots detta har uttrycket principle of least action hängt kvar, antagligen anspelande på Fermats princip (principle of least time).
Matematiskt kan man sammanfatta principle of least/stationary action i formeln:
Symbolen δ är grekiskans lilla delta och står för förändring/variation, dvs δS=0 innebär att vi söker den situation där action S är stationär (dvs har variationen lika med noll, vilket är liktydigt med att S har motsvarigheten till ett minimum eller ett maximum eller en terasspunkt). Ett annat sätt att uttrycka det på är att vi söker den bana för systemet (den väg systemet tar) där action förblir invariant (oförändrad) vid infinitesimala (mycket små) variationer (avvikelser) från denna bana. ∑ är summasymbolen och ∑mvs innebär helt enkelt summan av action för systemets alla "delsträckor" (ofta kan ett fysikaliskt systems utveckling bestå av flera segment, där olika fysikaliska förutsättningar gäller för de olika segmenten, och genom att addera action för dessa så får man systemets totala action). Dvs action är en additiv parameter, vilket förenklar våra beräkningar.
Den matematiska gren som sysslar med variationer av den typ som beskrivs ovan kallas variationskalkyl.
Observera att i fallet Fermats princip söker vi den väg mellan två punkter som tar kortast tid för en ljusstråle, med hänsyn tagen till ljuset olika hastigheter i olika medier (glas, luft, vatten...). Detta blir den väg som ljuset kommer att gå mellan de två punkterna.
I Maupertuis modell för mekaniska system, tillämpad på kulan i rännan ovan, söker vi således den bana (form på rännan), för vilken S (dvs action) har ett stationärt värde (dvs vi söker ett minimum eller ett maximum eller en terasspunkt för variationen av funktionen S). Denna banform är den väg som tar kortast tid (i just detta fall). Det visar sig, som vi sett ovan, att banan i detta fall är en del av en cykloid.
Nästan alla fysiker förkastade Maupertuis definition av action (S=mvs) och hans princip för minsta action (δS=0). Till och med hans fysikervänner tog avstånd från honom och tyckte han var en dåre. Maupertuis var nära vän med Voltaire. Den senare blev så arg på Maupertuis teori att han författade en skrift där han argumenterade mot teorin. Att Voltaires älskarinna hade varit otrogen med Maupertuis lär ha bidragit till Voltaires reaktion.
Det fanns dock två mycket framstående matematiker; Leonard Euler och Joseph-Louis Lagrange, som såg potentialen i Maupertuis ansats.
Euler lämnade en del viktiga bidrag till Maupertuis teori. Han fann att denna teori endast gällde om energin konserveras och om energin är samma för de olika möjliga vägar som systemet kan välja. Euler testade teorin genom att tillämpa den på en kropp som rör sig runt en centralkropp, där den inblandade kraften är gravitation. Dvs i princip en satellit/måne runt en planet eller en planet runt en stjärna, och fann att principle of least action förutsade banan korrekt (en ellips med centralkroppen i ena brännpunkten). Han generaliserade också Maupertuis formel på följande sätt
Eulers generalisering av Maupertuis formel innebar att han ersatte summan (∑) med en integral (∫). På så sätt kan man handskas med system, där variablerna och därmed action varierar kontinuerligt under systemets utveckling. Jag återkommer till detta i nästa avsnitt av föreliggande artikel.
Jag kan tyvärr inte här förklara vad en integral är, men övergripande kan man säga att en integral är en summa av oändligt många, oändligt små termer. En generalisering av summabegreppet. De gamla grekerna försökte t ex räkna ut cirkelns area genom att fylla den med rektanglar. Ju mindre de gjorde rektanglarna desto bättre fyllde de ut cirkeln och desto exaktare blev resultatet när de summerade deltrianglarnas areor (för att få cirkelns area). En integral fyller cirkeln med oändligt många, oändligt tunna rektanglar, vilket gör att rektanglarna exakt fyller ut cirkeln och summan av deras areor blir därför cirkelns exakta area. Den som vill veta mer om integraler rekommenderas att fråga AI eller googla.
Maupertuis var övertygad om att han hade gjort ett viktigt bidrag till fysiken genom upptäckten av principen för minsta verkan. Den fientlighet och det åtlöje han drog över sig genom sin teori tog honom hårt och tyvärr hann han inte få något erkännande så längde han levde. Det dröjde tills några år efter hans död innan hans teori fullt ut accepterades. Detta skedde tack vare att Lagrange (som vi strax återkommer till) lyckades lägga en solid grund för Maupertuis teori och bevisa dess giltighet. Tyvärr har historien inte behandlat Maupertuis väl eller rättvist. Utanför fysikerkretsar är han i stort sett helt okänd idag. Och de namn som numera nämns i samband med principle for least action är de som byggt vidare på Maupertuis teori (framför allt Euler, Jacobi, Lagrange och Hamilton). Inte för att de inte är värda att omnämnas. Deras bidrag till teorin har varit avgörande, men ändå tycker man att den som startade det hela också borde få erkännande för det. Inte minst med tanke på att han under sin livstid blev förlöjligad och närmast förföljd för sin teori.
Sammanfattning och fördjupning
Låt oss innan vi går vidare backa bandet lite och göra en repetition och fördjupning av hur principle of least action fungerar. Vi har alltså en funktion S, kallad action, som representerar ett fysikaliskt system som "rör sig" (man kan också säga utvecklas, eftersom det inte behöver handla om fysisk förflyttning) från punkt A till punkt B längs en viss bana (se figuren nedan). I Maupertuis originalteori var S=mvs (där m är massan, v är hastigheten och s den sträcka som systemet rör sig). Principle of least action går ut på att försöka hitta den väg för vilken systemets action (actionfunktionen S) mellan A och B är stationär. Detta innebär att små förändringar av denna bana inte förändrar systemets action, vilket uttrycks matematiskt som δS=0. δS (δ är grekiska bokstaven delta) är ett mått på hur funktionen S varierar för små avvikelser från den stationära banan, dvs fungerar ungefär som en derivata. Att action är stationär innebär normalt att vi har en motsvarighet till minimum eller maximum eller terasspunkt (de två senare är mindre vanliga men förekommer).

Figur I. Varje graf i figuren anger en möjlig utvecklingsväg som ett fysikaliskt system kan ta som funktion av tiden. Det behöver inte handla om att systemet förflyttas rumsligt. Systemet kan vara stillastående och förändras i tid. Mellan A och B finns oändligt många vägar/banor (trajectories på engelska), som systemet kan "välja". I det endimensionella fallet ges alla dessa möjliga vägar av funktionen q(t)=x(t)+η(t), där x(t) är den funktion som ger den sökta, stationära lösningen av S medan η(t) är en godtycklig funktion. Det är således funktionen x(t) som vi letar efter och som ger lösningen på problemet. Olika η(t) ger olika grafer kring den stationära lösningen x(t) och ju mindre η(t) är desto närmare ligger grafen den stationära lösningen. Normalt får vi olika värden på S(q(t))=∫mvds för olika vägar (mellan A och B), dvs för olika η(t). I principle of least action letar man efter den väg som ger en stationär action, vilken vi enligt ovan kallar x(t). Detta innebär att små förändringar av denna väg ((x(t)), dvs q(t)=x(t)+η(t) där η(t) är infinitesimalt litet), ger ett oförändrat värde av S(q(t). Koordinaterna x och q (och y och z etc i flerdimensionella fallet) behöver f ö inte vara rumskoordinater utan kan vara s k generaliserade koordinater (se nedan).
När vi ovan använder uttryck som "rör sig", "från punkt A till punkt B", måste vi hålla i åtanke att punkterna A och B och kurvorna i figuren ovan inte befinner sig i vårt vanliga, tredimensionella rum, utan existerar i ett abstrakt, mångdimensionellt rum (kan vara tusendimensionellt eller mer) som kallas konfigurationsrummet, vilket alldeles strax kommer att förklaras.
Observera att action inte beskriver själva banan (grafen i konfigurationsrummet som systemet rör sig längs). Action är i stället ett resultat av vilken bana systemet utvecklas längs. Flera olika banor kan ha samma action. Varje bana (de olika graferna i figuren ovan) beskrivs av en funktion. Läsaren kanske från sin skoltid minns att en rät linje beskrivs av funktionen y=kx+l och en parabel av y=x2. Det finns ett annat sätt att beskriva grafer och det är på s k parameterform. Har vi ett endimensionellt system så har vi bara en enda rumskoordinat, som vi kan kalla x. När ett objekt rör sig varierar objektets x-koordinat som funktion av tiden. Vi kan därför skriva x-koordinatens variation som x=x(t), dvs x(t) är en funktion av tiden t (mot varje värde på t svarar ett visst x-värde). I det endimensionella fallet kan således den optimala grafen (path of least action), för vilken action är stationär, skrivas som x=x(t). En liten förändring (avvikelse) av den stationära kurvan x(t) kan då skrivas som q(t)=x(t)+η(t), där η(t) är en infinitesimalt liten, godtycklig funktion (väldigt nära noll men skild från noll). Symbolen η är den grekiska bokstaven "äta". I det tredimensionella fallet kommer banans stationära form att beskrivas av tre funktioner, x=x(t), y=y(t) och z=z(t) och motsvarande för avvikelserna från den stationära banan (ηx, ηy och ηz).
En viktig sak att förstå är att det fysikaliska rum där banorna (i det endimensionella fallet q(t)=x(t)+η(t)) existerar (rummet i figuren ovan) inte är ett vanligt rum. Lagranges formalism (se nästa avsnitt) utspelar sig i det s k konfigurationsrummet. Om vi har ett system bestående av n partiklar, så representeras varje partikel av tre rumsdimensioner.
I ett vanligt tredimensionellt koordinatsystem finns tre axlar (x,y,z) och alla objekt i detta rum använder dessa tre koordinater för att ange sin position. I konfigurationsrummet finns tre axlar för varje partikel, dvs det finns tre gånger så många axlar som det finns partiklar. Partikel 1 använder axlarna (x1,y1,z1), partikel 2 axlarna (x2,y2,z2)... och partikel n axlarna (xn,yn,zn).
Dvs har vi n partiklar så är konfigurationsrummet 3n-dimensionellt. Har vi t ex 4 partiklar har detta rum 4⋅3=12 dimensioner. Fördelen med detta är att ett n-partikelsystem representeras av en punkt och systemets tidsutveckling representeras av att denna punkt rör sig längs en graf i detta mångdimensionella rum. Nackdelen är att rummet nu är 3n-dimensionellt. Den goda nyheten är att matematiken kan handskas med sådana rum utan problem (mer än att vi inte längre visuellt kan föreställa oss dem). Så resonemanget i samband med figuren ovan är oberoende av hur många dimensioner vi arbetar i. I konfigurationsrummet har vi alltid en kurva/graf på vilken systemet representeras av en punkt. Systemets tidsutveckling representeras av att denna punkt förlyttar sig från kurvans startpunkt till dess slutpunkt. Allt som skrivs ovan gäller därför oavsett antalet dimensioner.
Varje kurva (väg, bana) i figuren ovan representerar således en alternativ utveckling för ett visst fysikaliskt system. Det gäller att actionfunktionen S ges av S=S[q(t)]. Denna är lika med en integral. Vi skall således integrera en funktion av q, som i sin tur är en funktion av tiden t. Integrationen sker från starttiden till sluttiden (vilka vi således måste känna). Detta innebär att mot varje bana i figuren ovan får vi ett numeriskt värde på S, dvs på action. S är f ö alltid en skalär (lika med ett tal). Normalt ett reellt tal. I vissa fall, t ex kvantmekanik, kan S vara ett komplext tal. Vi söker nu efter en väg mellan A och B (x=x(t)) där S är stationär. Detta innebär att om vi varierar x(t) lite grand (avviker lite grand från denna bana) så ändras inte värdet på S. Action är således konstant för alla vägar som ligger nära denna väg. Enligt principle of least eller stationary action ges då systemets tidsutveckling av x(t).
Jag har full förståelse om läsaren tycker att det jag skriver ovan är svårt att förstå. Men om läsaren tar sig tid att gå igenom det exempel jag länkar till nedan så tror jag att förståelsen kommer. Där visar jag hur principle of least action grundläggande fungerar.
Principle of stationary action i sin moderna form (Lagrangeformalism)
Lagrange blev tidigt (redan som 19-åring) intresserad av Maupertuis teori och kom ganska snart med ett generellt bevis för principle of least action. I och med Lagrange hade nu principle of least action en stadig grund att stå på. Detta skedde ett år efter Maupertuis död. Lite sorgligt att Maupertuis aldrig fick uppleva sin upprättelse. Men så är livet och samma öde har drabbat många, många andra banbrytare inom olika områden.
Som nämnts ovan så generaliserade Euler Maupertuis teori och formulerade den som en integral i stället för en summa. På så sätt täckte teorin även situationer innefattande kontinuerliga förändringar i villkoren (t ex ett kontinuerligt avtagande lufttryck med ökande höjd). Låt oss nu titta lite närmare på detta med utgångspunkt från Eulers integralformulering.
Vi utnyttjar nu sambandet v=ds/dt, som är definitionen av hastighet. Sambandet säger att hastigheten (v) är lika med tidsderivatan av läget (s), dvs lägets förändring per tidsenhet (t ex per sekund). Uttrycket kan skrivas om som ds=vdt. Vi sätter nu in detta i uttrycket för action och får då:
Integralen är nu med avseende på tiden (dt) i stället för som innan, med avseende på sträckan (ds). Fortsättningsvis betecknar vi ett systems kinetiska energi (rörelseenergi) med T och dess potentiella energi (t ex lägesenergi) med V. Det gäller att T=mv2/2 (där m är massan och v hastigheten), vilket innebär att mv2=2T. Vi sätter nu in detta i formlen för least action och får:
Totala energin E för ett system är summan av kinetisk och potentiell energi, dvs E=T+V. Vilket är liktydigt med att T=E-V. Vi sätter in detta i formeln ovan:
Principle of least action kan nu skrivas som
I stället för mvs definierar vi nu action som T+E-V, dvs kinetisk energi plus total energi minus potentiell energi. I Lagranges formulering är det detta uttryck vi skall söka en stationär bana för. Men vi går vidare:
Här har vi utnyttjat att integraler och derivator (inkluderande differenser/variationer) är linjära, dvs att integralen och derivatan av en summa av funktioner är lika med summan av funktionernas integraler respektive derivator. Vi betraktar nu den sista termen.
Här har vi antagit att energin är konstant, vilket leder till att vi kan flytta ut E ur integralen och sätta E framför integralsymbolen. Dessutom gäller att ∫dt=t (integranden är här lika med 1).
Här har vi använt formeln för derivatan av en produkt. (motsvarande formel gäller för variationer). Eftersom δE=0 (variationen av E, som är konstant, är noll) försvinner sista termen i mellanledet (tδE). Resultatet blir nu:
Principle of least action kan således sammanfattas i:
Om vi begränsar oss till banor som tar samma tid mellan A och B blir Eδt=0 och vi får:
Grundläggande så är formeln ovan identisk med Maupertuis formel (S=∑mvs), även om den ser annorlunda ut. Vi har ju ovan utgått från denna formel och sedan använt definitionerna av kinetisk energi, hastighet etc plus lite algebra för att ge Maupertuis formel ett lite annorlunda utseende. Formeln kallas ibland Lagranges formel för minsta verkan.
Ofta används beteckningen L=T-V, där L kallas Lagrangian (på engelska, jag har aldrig hört något svenskt ord). Dvs vi kan skriva principle of least action som:
Det fina med denna formel är att man inte behöver vara duktig i fysik. Känner man de matematiska uttrycken för ett systems kinetiska (T) och potentiella (V) energi så är det bara att stoppa in dessa i formeln ovan och vips så har man lösningen. Detta gör att matematiker kan lösa svåra fysikaliska problem utan att ha någon djupare förståelse av fysik. Man kan se formeln som en "maskin" som löser fysikaliska problem, utan att den som använder den förstår fysik. När jag skriver "vips" så menar jag inte att det är lätt att lösa dessa problem. Det kan innebära väldigt långa och svåra matematiska beräkningar. Men det är ju sånt som matematiker förhoppningsvis är duktiga på. Och fördelen är att de slipper att vara duktiga i fysik.
Klicka här för att se ett exempel på en beräkning med hjälp av Lagranges formalism. Exemplet är avsett att vara pedagogiskt och illustrerar grundläggande principer. Kräver gymnasiekunskaper på Natur (eller kanske lite mer).
Härledningen ovan av Lagranges formel visar på ett ungefär hur begreppet action har vuxit fram och utvecklats, från Fermat och sedan via Maupertuis till Lagrange. I avancerade kurser i analytisk mekanik härleder man principle of least action på helt andra och mer teoretiska sätt. Men det krävs ganska mycket matematikkunskaper för att hänga med i sådana härledningar. Därför har jag ovan valt en väg som i princip endast innehåller gymnasiematematik. Plus att den ger läsaren en bättre fysikalisk förståelse för begreppet least action. I de mer teoretiska härledningarna slipper man resonemang som "den här termen är så liten så vi kan bortse från den", dvs de är mer robusta.
Idag skriver man ofta Lagranges formel (för n partiklar):
där ∂ är symbolen för partialderivata (för flervariabelfunktioner kan man derivera med avseende på flera variabler). Bokstaven q betecknar generaliserade koordinater (se nästa stycke) och q med en punkt över (q-punkt) i nämnaren i parentesen är ett kompakt sätt att beteckna tidsderivatan av q (dq/dt). Vi får således en andra ordningens (vi har ju derivatan av derivatan i första termen) differentialekvation per partikel, dvs sammanlagt n ekvationer av andra ordningen i fallet n partiklar. Variablerna i sambandet ovan är q och q-punkt, vilka i de enklaste fallen innebär läge och hastighet.
De vanliga rumskoordinaterna (x,y,z) brukar kallas kartesiska koordinater. Variablerna qi i Lagranges formel betecknar grundläggande rumskoordinater men kan också ha andra innebörder. De kallas därför generaliserade koordinater, eftersom de kan definieras på andra sätt än som x,y,z. Har man olika typer av tvångsvillkor eller symmetriska rörelser (exempelvis cirkelrörelse) och liknande, kan man genom att definiera om rumskoordinaterna på lämpligt sätt förenkla ekvationerna betydligt. Dvs q kan vara en vanlig kartesisk rumskoordinat men kan också vara t ex en vinkel eller ett avstånd till ett rotationscentrum etc. Den andra variabeln i sambandet ovan är qi-punkt (qi med en punkt över), vilken står för tidsderivatan av qi. Om q är en vanlig rumskoordinat är q-punkt helt enkelt objektets hastighet. Generaliserade koordinater används flitigt inom både Lagrange- och Hamiltonformalismerna (den senare kommer strax att beskrivas).Formeln kan härledas ur δ∫(T-V)dt=0 (se ovan), men det blir ganska bökigt, och skulle inte tillföra något till det jag vill förmedla med föreliggande artikel.
Angående partialderivata: Antag att vi har funktionen y=y(x,t), dvs att funktionen y beror på variablerna x och t. ∂y(x,t)/∂x anger då hur y varierar när systemet flyttas längs x-axeln. Medan ∂y(x,t)/∂t anger hur y förändras med tiden, dvs hur mycket y förändras per sekund (eller annan tidsenhet).
Hamiltonformalismen och dess relation till Lagranges formalism
Det finns en ytterligare matematiker som lämnat viktiga bidrag till principle of least action, nämligen William Rowan Hamilton (1805-1865). Denne använder i stället för L=T-V uttrycket H=T+V, där H kallas Hamiltonian och representerar systemets totala energi (T+V).
Med hjälp av s k Legendretransformer kan man tranformera Lagranges formalism till Hamiltons. Dvs de är nära besläktade men ändå lite olika.
Idag använder man både Lagranges och Hamiltons tekniker. Den förstnämnda lämpar sig bäst när det gäller att handskas med komplexa system med tvångsvillkor. Lagranges ansats används t ex inom relativitetsteorierna. De variabler som används här är position och hastighet. Ett flerpartikelsystem bestående av n partiklar (som var och en har 3 rumskoordinater) representeras av ett rum med 3n dimensioner, kallat konfigurationsrummet. Har vi 7 partiklar är konfigurationsrummet således 21-dimensionellt. Lagranges formalism leder till ett system av n st andra ordningens differentialekvationer (dvs som innehåller andraderivator).
Hamiltons ansats är idealisk för teoretiska studier av mekanik, som innehåller symmetrier (Noethers teorem) och där man vill undersöka energins konservering. Inom kvantfysik och statistisk mekanik är Hamiltons metod mest lämpad. Följande ekvation är kvantmekanikens grundekvation och kallas Schrödingerekvationen och följer direkt ur Hamiltons ekvation:
|Ψ> är den s k vågfunktionen, som är en funktion av rumskoordinaterna och tiden, dvs |Ψ>=|Ψ(x,y,z,t)> och som beskriver ett kvantmekaniskt systems dynamiska egenskaper. Ĥ är Hamiltonoperatorn. Inom kvantmekaniken representeras fysikaliska storheter (position, hastighet, energi etc) av operatorer. Genom att operera på vågfunktionen med rörelsemängdsoperatorn får man systemets rörelsemängd. Hamiltonoperatorn, verkande på vågfunktionen i högra ledet representerar systemets totala energi. I vänstra ledet har vi tidsderivatan av vågfunktionen, som är kopplad till vågfunktionens tidsutveckling. Schrödingerekvationen antyder således att det existerar ett samband mellan energi och tid.
I Hamiltons formalism är variablerna position och rörelsemängd (p=mv) eller generaliserade motsvarigheter. Som koordinater används här både position och rörelsemängd. Dvs ett system representeras i hamiltonformalismen av ett 6n-dimensionellt rum, kallat fasrummet. Varje partikel har 6 koordinater; 3 rumskoordinater och 3 rörelsemängdskoordinater. Partikel n har således koordinaterna; xn,yn,zn,pnx,pny,pnz i fasrummet. Ett n-partikelsystem beskrivs därför i ett 6n-dimensionellt rum. För 7 partiklar är fasrummet 42-dimensionellt. I Hamiltonformalismen får vi följande differentialekvationer:
Figuren visar Hamiltons ekvationer för n partiklar. Två första ordningens (förstaderivator) ekvationer per partikel, dvs sammanlagt 2n ekvationer av första ordningen om vi har n partiklar.
Här har vi tiden t som en explicit variabel plus de generaliserade koordinaterna qi och rörelsemängden pi. I fasrummet använder man bara q och p som koordinater (se bilden nedan).
Hos Hamilton får man dubbelt så många ekvationer för ett n-partikelsystem som om man använder Lagrange (2n i stället för n). Å andra sidan är ekvationerna i Hamiltons formalism av första graden, dvs betydligt lättare att lösa. Hamiltonformalismen ger således dubbelt så många men betydligt enklare ekvationer än Lagrangeformalismen. I praktiken blir det ungefär lika bökigt, rent beräkningsmässigt, vilken formalism man än väljer.
Lagranges formalism är tidsoberoende medan Hamiltons är rumsoberoende.
Relationen mellan fysiskt rum och fasrum — ett enkelt exempel
Låt mig nu ge ett enkelt exempel på Hamiltons formalism och fasrummet. För att ge lite mer förståelse:
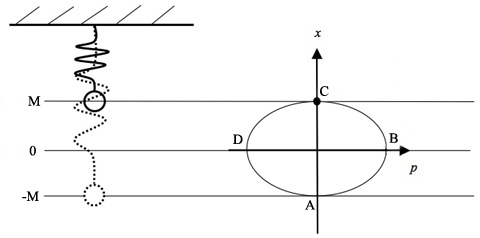
Till vänster ser vi en kula som hänger i en fjäder och till höger representationen av detta i fasrummet. I det fysiska rummet ges kulans vertikala position av en x-koordinat medan systempunktens läge i fasrummet ges av kulans rumskoordinat x (som är en funktion av tiden t) och dess rörelsemängd p (som också är en funktion av tiden). Jag använder beteckningen x och inte q, eftersom vi i detta fall har kartesiska koordinater i fasrummet. Kulan svänger upp och ner vertikalt (dvs endimensionellt) utan friktionsförluster (fjädern antas vara absolut elastisk). Vi bortser från tyngdkraften. Fjäderns svängningsamplitud kommer då att vara konstant (den svänger mellan x=M och x=-M). Fjäderns neutralläge är i x=0 (i punkterna B och D i fasrummet), där fjädern är slak. Jag väljer detta enkla fall, eftersom om kulan rör sig i tre rumsdimensioner, går det inte att illustrera rörelsen i fasrummet lika tydligt och enkelt (eftersom fasrummet då blir 6-dimensionellt — tre rums- och tre rörelsemängdskoordinater, eller motsvarande generaliserade koordinater). Exemplet avser att hjälpa läsaren att förstå hur fasrummet relaterar till det vanliga rummet. I fasrummet, som här är tvådimensionellt (vi har bara en partikel och en dimension) och har axlarna p (=mv) och x, kommer systempunkten (som representerar kulan) att röra sig moturs längs "ellipsen".
Den vänstra figuren visar således kulans rörelse i det vanliga rummet (upp och ned). I figuren befinner sig kulan högst upp, vilket är punkt C i den högra figuren, vilken illustrerar kulans rörelse i fasrummet. Rörelsen i fasrummet avspeglar rörelsen i det verkliga rummet. Kulan befinner sig således inledningsvis i punkten C (x=M och p=0) i fasrummet. Den befinner sig högst upp och är stillastående, eftersom den vänder i denna punkt (fjädern pressar nedåt). Rörelsemängden är således lika med noll här. Eftersom fjädern pressar kulan nedåt (den är hoppressad), så accelererar kulan nedåt. Rörelsemängden p är nu negativ, eftersom den är riktad i negativ x-led. När kulan passerar x=0 (punkten D) har p sitt största negativa värde. Efter att kulan passerat D börjar fjädern verka uppåt och bromsar in kulan med en allt större kraft (som är proportionell mot hur mycket fjädern dragits ut eller pressats ihop). Detta leder till att p minskar. I A befinner sig kulan i sitt nedre ändläge (x=-M). Farten och därmed rörelsemängden är nu noll. Fjädern är här utdragen och verkar nu maximalt uppåt, varför kulan accelererar uppåt (dvs p blir positiv och ökar). I punkten B passerar kulan x=0 på väg uppåt, med maximal positiv p. När kulan åker upp och ned genomlöper systempunkten således den liggande "ellipsen" moturs. Om högra figuren vore animerad skulle vi se den svarta punkten vid C röra sig moturs längs ellipsen, varv efter varv. En endimensionell, fram- och återgående rörelse i det vanliga rummet avbildas således som en rotation i ett tvådimensionellt fasrum. I praktiken har vi friktion varför svängningsamplituden hela tiden minskar. I verkligheten kommer systempunkten i fasrummet därför att följa en spiral för att så småningom sluta i origo (p=0, x=0).
Till vänster ser vi således hur kulan rör sig i det verkliga rummet (det vi ser med blotta ögat) medan vi till höger ser kulans "världslinje" i fasrummet. En ellipsliknande kurva, som kulan genomlöper moturs. Ett varv per svängning. Och inför vi friktion, rör sig systempunkten längs en elliptisk spiral som slutar i origo. Så läsaren ser förhoppningsvis att detta med fasrummet inte är oöverstigligt komplicerat, rent principiellt. Sedan blir det givetvis komplicerade räkningar för komplexa problem. Jag hoppas i alla fall att detta enkla exempel var uppysande!
Några avslutande kommentarer
Att arbeta i mångdimensionella rum är inget problem rent matematiskt. Däremot kan vi inte föreställa oss mer än 3 dimensioner och inte heller illustrera fler dimensioner. Fördelen med konfigurations- respektive fasrummet är att ett n-partikelsystem representeras av en enda punkt och systemets tidsutveckling av denna punkts förflyttning längs en kurva. Genom Lagrange- och Hamiltonformalismens höga abstraktionsnivå (i konfigurations- respektive fasrummet) får man en översikt över komplicerade fysikaliska sammanhang och kan se hur saker och ting hänger ihop. När man formulerar samma problem i Newtons mekanik, blir det ofta så plottrigt att det är svårt se några allmäna, övergripande principer eller strukturer.
Båda dessa formalismer ger identiska resultat, men vägen till detta resultat kan vara avsevärt enklare i någon av formalismerna (beroende på problemets art). Båda formalismerna ger exakt samma resultat som Newtons formalism, där man använder Newtons tre rörelselagar. Svåra problem, som dubbelpendeln (en pendel som är upphängd i en annan pendel) är mycket arbetskrävande att lösa med Newtons mekanik, plus att man måste vara en duktig fysiker med stor fantasi och mycken erfarenhet. Med hjälp av Lagranges metod kan detta problem lösas mer eller mindra automatiskt, utan några djupare kunskaper i fysik. Själva det praktiska räknearbetet som krävs är oftast ungefär samma oavsett vilken lösningsmetod man än väljer. Det finns sällan några genvägar när det gäller hur mycket arbete som krävs. Eller som Einstein uttryckte det, "Genius is 1% inspiration and 99% transpiration".
Klicka här för att se ett exempel på en beräkning med hjälp av Lagranges formalism. Exemplet är avsett att vara pedagogiskt och illustrerar grundläggande principer. Kräver gymnasiekunskaper på Natur (eller kanske lite mer).
Jag hittade en väldigt trevlig och informativ och pedagogisk video som handlar om ovanstående. Jag har hämtat en del från denna video till texten ovan, eftersom jag tyckte den låg på en lagom nivå. Så titta gärna på den som ett komplement till min text. Klicka här för att se denna video!
Och här hittar läsaren en kort fördjupande artikel som visar hur principle och least action kan ge oss viktiga teoretiska insikter när det gäller termodynamik och andra statistiska, fysikaliska teorier.
Bilaga:
Inledningsvis så lovade jag återkomma till varför ljuset normalt "väljer" den väg som tar kortast tid. Detta har med ljusets vågnatur att göra (f ö gäller Fermats princip inte bara ljus utan all elektromagnetisk strålning).
Innan vi går vidare måste jag förklara begreppet interferens. Om två vågor med samma amplitud (våghöjd när det gäller vattenvågor) anländer samtidigt till en punkt så är en möjlighet att de ligger i fas (fasförskjutning noll eller är fasförskjutna ett helt antal våglängder). I detta fall kommer vågtopp från ena vågen att anlända samtidigt som vågtopp från andra vågen och resultatet blir dubbla amplituden (våghöjden om vi talar om vattenvågor). Detta kallas konstruktiv interferens. Om den ena vågen är fasförskjuten en halv våglängd, eller ett udda antal halva våglängder, relativt den andra vågen, kommer ett vågberg från den ena att ankomma samtidigt som en vågdal från den andra, och de två vågsystemen tar ut varandra. Man brukar säga att vågorna då anländer i motfas. Detta kallas destruktiv interferens. Vid andra fasförskjutningar får man en summa av vågorna som ligger någonstans emellan noll (motfas) och dubbla amplituden (fas).
Den kände fysikern Richard Feynman menar, när det gäller Fermats princip, att vi måste sluta tänka på ljus som partiklar och strålar och i stället tänka på ljus som vågor. När ljus går från A till B, tar det inte bara en enda väg. I kvantperspektivet så "utforskar" ljuset varje väg samtidigt. Vi kan föreställa oss tusentals möjliga vägar mellan A och B. För de vägar som tar längre tid än den kortast möjliga tiden, så varierar fasen (vågornas tidsförskjutning). När dessa vågor ankommer till slutpunkten (B) är de inte i fas, eftersom de färdats olika långa vägar. En vågs "topp" ankommer samtidigt som en annan vågs "dal" och de tar helt eller delvis ut varandra (destruktiv interferens). Men för alla de vågor som ligger väldigt nära vägen för kortast tid så är utbredningtiden i stort sett densamma (det är ju det som utmärker en stationära väg). Dessa vågor kommer då att anlända synkroniserade, dvs i fas. De adderas till varandra (förstärker varandra) och skapar en stark ljussignal (konstruktiv interferens). Dvs resultatet blir att det ljus som vi ser helt enkelt är resultatet av att alla "felaktiga vägar" tar ut varandra (släcker ut varandra) och det enda vi ser är det ljus som tar den effektivaste vägen (som tar kortast tid).
Det finns en del problem med Feynmans förklaring (jag är inte helt såld på den) och läsaren kan ju roa sig med att googla eller fråga AI.
Det finns en direkt koppling mellan Fermats princip och Lagrange- och Hamiltonformalismerna för mekaniska (och andra) system. I den moderna fysiken existerar inga partiklar i egentlig mening, utan allting är vågor. Hela universum genomsyras av ett kvantfält och det vi kallar partiklar (fotoner, elektroner, protoner etc) är excitationer av detta fält.
Tröghetslagen säger att ett objekt som inte påverkas av några krafter (eller där summan av krafterna är noll) bevarar sitt rörelsetillstånd. Dvs föremål i vila fortsätter att befinna sig i vila och föremål som rör sig fortsätter rakt fram med konstant fart i evigheters evighet (om det inte kolliderar med något). I det exempel jag länkar till ovan visar jag att tröghetslagen (F=am) följer direkt ur Lagranges formalism. Ur detta följer också att ett objekt som inte påverkas av några krafter rör sig i en rätlinjig bana. Och detta gäller både ljus och materiella objekt. Ljus påverkas f ö av gravitation (eftersom det har energi). Jorden påverkar således ljus gravitationellt, men denna effekt är antagligen omätbar. Solens gravitationsfält är oerhört mycket starkare än jordens och den gravitationella effekten kan mätas när det gäller ljus från avlägsna stjärnor, vilket passerar nära solen (kan endast observeras vid total solförmörkelse). Detta var ju en av de observationer som bekräftade allmänna relativitetsteorin.
Principle of stationary action utgör således en grundläggande princip inom fysiken. En slags "theory of everything". Genom denna princip så kan man per automatik matematisera fysiken, dvs översätta den till matematik, så att matematiker med begränsade kunskaper och erfarenheter inom fysikområdet kan lösa svåra fysikaliska problem.
Det finns ett fascinerade djup i teorin för least stationary action och man leds lätt in i metafysikens och filosofins domäner. Richard Feynman berättar i en av sina böcker om hur hans fysikintresse väcktes under gymnasietiden. Han var trött en dag och satt och halvsov på fysiklektionen. Efter lektionen bad läraren att få tala med Richard och sa att han tyckte Richard såg lite hängig ut. Och så berättade han inspirerat, illustrerande på svarta talan, om principle for least action, och Richard blev helt fascinerad. Detta bidrog, enligt honom själv, starkt till att han valde fysiken som sin bana, Vilken kröntes med ett välförtjänt nobelpris.
Tillbaka till artikeln "Fysik för fotgängare"