- Startsida
- Aktuella händelser/artiklar
- Livsåskådning & kristen tro
- Vetenskap & tro
- Skapelse & evolution
- Modern fysik
- Dagens adrenalinkick
- Kristers intressen, olika
kuriosa mm - Litteraturförteckning
- Inspelningar från mina
föredrag och predikningar - Innehållsförteckning
- Textsökning
- Info om hemsidan. Hur
navigerar man och hur
skriver man ut? Nyheter. - Maila mig
 SENASTE ARTIKELN:
SENASTE ARTIKELN:
Västvärldens undergång
(260104)- BRÄNNANDE ARTIKELSERIE:
Israel — ett älskat
hatobjekt (250815) - SÄRSKILT VIKTIG ARTIKEL:
Klimatet — en alltför
viktig fråga för att
låta känslor styra
(200302) - KRISTERS BLOGG
(Besöks på egen risk!)
Senast uppdaterad:
20/1 2018
![]()
"Godhet utan vishet och utan
gränser är bara en annan
form av ondska."
(John Paterson)
"Mänsklighetens bästa är alltid
tyrannens alibi!"
"Det är synd att 99% av
journalisterna skall fördärva
förtroendet för en hel yrkeskår"
(Okänd)
"Om du ropar "Gud är stor"
samtidigt som du spottar på
skändade kroppar av judiska
kvinnor, så hävdar jag att
din gud inte är en gud värd
att tillbe!
"När försiktigheten finns överallt,
finns modet ingenstans."
(den belgiske kardinalen Mercier)
"Den som gifter sig med
tidsandan blir snabbt änka."
(Goethe)
"Civiliserade är de kulturer
och individer som respekterar
andra."
(Hört på Axesskanalen)
"Det tragiska med vanligt
sunt förnuft är att det
inte är så vanligt."
(Albert Einstein)
"Halv kristendom tolereras
men föraktas.
Hel kristendom respekteras
men förföljs."
(Okänd)
En tillämpning av principle of least action
(Note: at the top of the page you can choose translation of this article to other languages, but don't expect the translation to be perfect — "Välj språk" means "Choose language")
Nedan ges en enkel tillämpning på principle of least action. För att fullständigt förstå resonemanget krävs kunskaper i funktionslära på gymnasienivå (natur). Innan man läser föreliggande artikel är det lämpligt att läsa huvudartikeln om principle of least action (länk i slutet av denna artikel).
Vi skall nu tillämpa principle of least action på ett enkelt exempel för att få en uppfattning om hur denna princip fungerar i praktiken. Vi tänker oss att vi kastar eller skjuter iväg ett objekt (t ex en boll eller kula) med massan m vertikalt rakt upp med en viss fart (från punkt A i figuren nedan). Objektets fart (v) kommer att minska allt eftersom den ursprungliga rörelseenergin (T=mv2/2) övergår till potentiell energi (V=mgy, där y är objektets höjd och konstanten g tyngdaccelerationen). När all rörelseenergi omvandlats till potentiell energi är kulans uppåtriktade fart lika med noll och kulan vänder då (C) och börjar falla tillbaka nedåt under det att den accelererar, driven av gravitationskraften. Slutpunkten är punkt B. Potentiell energi blir rörelseenergi under rörelsen nedåt.
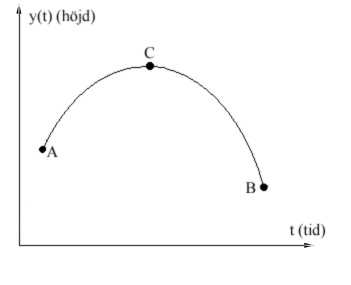
Grafen visar objektets höjd y (över marken eller över A eller över någon godtycklig referenshöjd) som funktion av tiden, dvs y=y(t). Problemet är endimensionellt, eftersom vi bara har en rumskoordinat (y). Jag använder y här, eftersom rörelsen är vertikal och y brukar vara den vertikala axeln. A är den punkt där objektet skjuts iväg och B är slutpunkten. C är den punkt där objektet vänder och börjar falla nedåt. Vi skall således ta fram objektets rörelse mellan dessa punkter. Rumsligt så ligger A exakt vertikalt ovanför B. Grafen visar således inte hur objektet rör sig i rummet (typ kastparabel) utan visar hur objektets höjd (y) varierar med tiden. Observera alltså att objektets rörelse är endimensionell! Objektet kommer, under sin nedåtgående rörelse, att passera genom punkt A på sin väg mot punkt B (som ligger lägre än A.
För att förtydliga: Det vi ser i grafen ovan är inte vad ögat skulle se. Visuellt så skulle vi se ett föremål (boll eller liknande) som skjuts iväg vertikalt uppåt från punkten A. Vi skulle se hur hastigheten avtar med ökande höjd för att till slut avstanna (punkt C), varefter bollen faller tillbaka vertikalt under ökande fart. Under fallet passerar den A för att sluta i B. Bollen rör sig således endast rakt uppåt och rakt nedåt. Figuren visar den rumsliga rörelsen (vertikalt) som en funktion av tiden. Vilket är en helt annan sak.
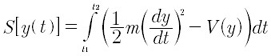
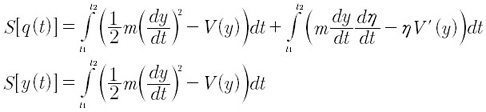
Vi skall således använda principle of least action (prinicipen för minsta verkan) för att lösa uppgiften (ta reda på hur objektet kommer att röra sig från A till B som funktion av tiden). Principle of least action sammanfattas i följande samband (se huvudartikeln):
där T är den kinetiska energin och V är den potentiella energin. Action S är en funktion av y, vilken i sin tur är en funktion av tiden t (dvs S=S[y(t)]). Uppgiften är nu att finna den bana, y=y(t), mellan A och B för vilket action, S[y(t)], är stationär (vilket oftast innebär att den har ett minimum).
I vårt fall gäller att T=mv2/2 och V=mgy.
Här är m objektets massa, v dess hastighet, g är tyngdaccelerationen (ca 9,8 m/s2) och y är objektets y-koordinat. Observera att massan m är konstant!
Vi tänker oss nu att vi ändrar lite grand på den stationära bana, som beskrivs av funktionen y(t) genom att till y(t) addera funktionen η(t) (grekiska bokstaven lilla "äta"). Den senare är en godtycklig, infinitesimalt liten funktion, vilken kan betraktas som en störning av funktionen y(t). Vi får då en ny funktion q(t)=y(t)+η(t) mellan A och B. Action för den "störda" banan blir nu S[q(t)]. Om S[y(t)] är den stationära lösningen kommer S[q(t)] att vara lika med S[y(t)] för små störningar (den stationära lösningen ändras inte vid små störningar av den). Dvs:
Vi söker således den bana för systemet mellan A och B (den väg systemet tar mellan dessa punkter) där action (∫(T-V)dt) förblir invariant (oförändrad) för infinitesimala (mycket små) avvikelser (variationer) från denna bana.
För rörelseenergin T gäller att
eftersom dy/dt (förändringen av y-koordinaten per sekund) är lika med hastigheten i y-led.
Dvs action för den bana som utgör lösningen av problemet (y(t)) är:
Att ta fram S[q(t)] för den störda banan q(t) (dvs den bana som avviker lite grand från den stationära lösningen) är lite mer komplicerat. Vi börjar med att ta fram den kinetiska energin T. Observera att variabeln i S nu inte är y(t) utan q(t)=y(t)+η(t).
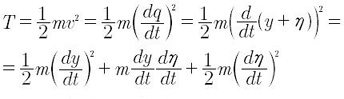
Sista likheten följer dels av att derivatan är en linjär operator (derivatan av en summa är lika med summan av termernas derivator) och dels av kvadreringsregeln (a+b)2=a2+2ab+b2. Motsvarande för den potentiella energin blir:

Här har vi utvecklat V(q) i en Maclaurinserie (η ligger nära noll). Eftersom η är ett litet tal kan vi bortse från η2 och högre potenser. V' står för derivatan av V (dV/dy) och V" för andraderivatan (d2V/dy2). Resultatet blir:
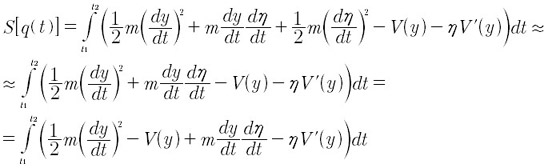
I andra likheten har vi satt termen m(dη/dt)2/2 lika med noll. Vilket kan motiveras på följande sätt: Funktionen η(t) är en infinitesimal storhet (dvs mycket liten men inte noll), eftersom S[y(t)+η(t)] endast får avlägsna sig obetydligt från S[y(t)] för att systemet skall vara stationärt (vi undersöker endast det "stationära" området kring S[y(t)]). Vi utgår också från att η(t) är "well behaved", dvs inte gör dramatiska språng (eftersom värdet på η hela tiden måste vara mycket nära noll). Formellt säger man att funktionen q(t), och därmed η(t), måste vara differentierbar (vilket innebär att den har en väldefinierad derivata i varje punkt i sin definitionsmängd). Tidsderivatan av η(t), dvs dη/dt, måste därför vara ett litet tal och eftersom vi har denna derivata i kvadrat (dη/dt)2) blir uttrycket ännu mycket mindre.
Vi får således:
Eftersom δS=S[q(t)]-S[y(t)] får vi:
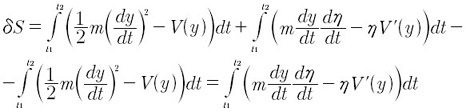
Observera att första och sista termen i mellanledet tar ut varandra. Partiell integrering av första termen i sista uttrycket ger nu:
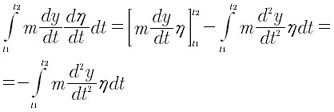
Första termen i uttrycket för partialderivatan (i mellanledet) blir noll, eftersom η(t1)=0 och η(t2)=0 (t1 och t2 är ju objektets start- och sluttid). Detta på grund av att den störda banan (q(t)=y(t)+η(t)) måste gå genom start- och slutpunkten (A och B). Vid tiden t1 befinner sig objektet i A och vid tiden t2 i B. Så just i dessa två punkter är q(t)=y(t), dvs y(t)+η(t)=y(t). Vilket är liktydigt med att η(t)=0 där.
Villkoret för δS=0 kan nu skrivas:

Vi har således brutit ut η ur de två termerna. Eftersom η(t) kan anta godtyckliga värden, måste uttrycket inom fyrkantparentesen vara (identiskt) lika med noll för att likheten skall gälla (egentligen borde vi ha använt ≡ och inte =), dvs den stationära lösningen är:
Andraderivatan av y med avseende på tiden är objektets (vertikala) acceleration (a) och minus derivatan med avseende på y av potentiella energin (−V'(y)=−dV(y)/dy) är lika med kraften F(y) (i y-led, dvs vertikalt) på objektet (detta är elementär mekanik). Dvs sista uttrycket är således ekvivalent med −ma+F(y)=0 eller med andra ord:
vilket är lika med den enklaste formen av Newtons andra lag (kraft lika med acceleration gånger massa). Vi antar således här att massan är konstant (ovan har vi konsekvent behandlat m som en konstant). Eftersom problemet är endimensionellt (vi har ju bara en enda axel — y-axeln) så är vektorer (krafter, hastigheter och accelerationer) vertikala, där minustecken betyder riktning nedåt.
Vi har alltså med hjälp av principle for least action visat att objektet följer den välkända lagen F=am. Vilket vi redan visste innan. Ovanstående kan tyckas vara ett komplicerat sätt att lösa ett enkelt problem. Att knäcka en nöt med en storslägga. Men avsikten med exemplet var inte att lösa ett problem utan att genom ett enkelt exempel, där vi redan vet lösningen, illustrera hur principle of least action fungerar. Plus att visa att denna metod, åtminstone i detta fall, ger en korrekt lösning.
I själva beräkningen ovan har vi bara satt in det allmänna uttrycket för kinetisk energi (mv2/2) och använt en generell symbol för potentiell energi (V) i Lagranges formel. Vi har således inte löst något specifikt problem, där vi får svaret i numeriska värden. Utan har löst problemet generellt utifrån principle of least action, och kommit fram till det generella resultatet att tröghetslagen gäller för alla objekt. Visserligen har vi bara visat att detta gäller för endimensionella, vertikala system, men eftersom vi ingenstans förutsatt någon speciell rumslig riktning när vi löst problemet, måste lösningen gälla generellt i alla riktningar.
Tillämpar vi lösningen på vårt speciella exempel (en boll eller liknande som skjuts rakt uppåt med en viss fart), gäller att V=mgy, vilket leder till att V'(y)=dV(y)/dy=mg. Kraften är således lika med -mg (eftersom kraften är negativa derivatan av potentialen). Dvs resultatet blir -mg=am. Observera att a och g inte har något med varandra att göra. Tyngdaccelerationen g utgör ett lokalt mått på styrkan hos jordens gravitationsfält medan accelerationen a handlar om hur objektets rörelse förändras under påverkan av tyngdkraften. Efter förkortning med m (m≠0) får vi att
dvs objektets acceleration a är lika med -g (g≈9,82 m/s2 på jorden) och är riktad nedåt (minustecknet). På uppvägen minskar farten med ca 9,82 m/s per sekund, eftersom accelerationen är motriktad rörelsen (negativ acceleration), medan farten på nedvägen ökar lika mycket per sekund, eftersom acceleration och hastighet nu har samma riktning. Vet vi utgångsfarten v kan vi med kinematiska samband (rörelselagar typ s=vt, s=at2/2 etc) enkelt räkna ut hur högt objektet kommar att stiga innan det börjar falla tillbaka. Så detta är vår numeriska lösning (ingenjörslösningen).
Genom uttrycket a=-g har vi visat ytterligare en sak, nämligen att alla objekt faller lika fort (har samma acceleration) oberoende av massan (som vi ju kunde förkorta bort ovan). Förutsättningen är att vi inte har någon friktion (något luftmotstånd). Vilket är vad vi antagit i härledningen ovan. Galilei motbevisade genom listiga experiment Aristoteles påstående att "tyngre" objekt faller fortare (enbart på grund av att de är tyngre) än lättare objekt. Newton visade samma sak teoretiskt utifrån sina tre rörelselagar. Och nu har vi visat samma sak teoretiskt utifrån principle of least action.
"Tyngre" objekt faller således inte fortare än "lättare" objekt för att de är tyngre (vilket Aristoteles och de gamla grekerna trodde). Våra (och de gamla grekernas) observationer att "tyngre" objekt faller fortare (har större acceleration) än "lättare" objekt, beror på att tyngre objekt (som blykulor) ofta har större förhållande mellan massa och luftmotstånd (på grund av sin större densitet) än lättare objekt (som fjäderdun). Det Aristoteles observerade hos fallande kroppar, hade inte en enda orsak, utan visade sig vara summan av två krafter; tyngdkraftens (gravitationens) verkan på den fallande kroppen och luftmotståndet. Enbart tyngdkraften kan inte förklara det man observerar, eftersom alla kroppar faller lika fort om endast tyngdkraften är involverad (vilket vi bevisat ovan). Genom denna insikt tog fysiken ett stort, stort steg framåt.
Principle of least action är således användbar såväl för teoribygge som för praktiska beräkningar.
Tillbaka till artikeln "Fysik för fotgängare"
Tillbaka till huvudartikeln om principle of least action